
Safety plays a critical role in autonomous vehicle deployment. Any incident involving an AV is likely to attract the attention of luddites and click-seeking commentators. But while people expect machines to perform flawlessly, exceeding mere human limitations, current AV sensor systems cannot satisfy those expectations.
Don Wilkins, a retired aerospace systems engineer, challenges these expectations and calls for a rethink of how autonomous systems are developed and evaluated

Adverse weather such as heavy rain, thick snow and impenetrable fog, and wide variations in lighting can blind AV sensors. Researchers are working to improve sensors and supporting algorithms, however, progress is slow and uncertain. Another technology, Vehicle Ad hoc Networks (VANET) – which wirelessly knits vehicles, infrastructure and vulnerable road units (VRU) such as pedestrians and bicyclists into networks – bypasses sensor limitations to improve situational awareness for both human and autonomous drivers.
Vehicles intended for VANET operations integrate a short-range communications device, a positioning device, a processing platform and application software; the complement is the onboard equipment (OBE), which exchanges data with road side equipment (RSE), deployed along major highways and at intersections. Vehicles with VANET OBEs communicate with other similarly equipped vehicles.
Connected vehicles can be an important AV sensor, particularly if pedestrians, bicyclists and other road users are drawn into the network. Information spread among vehicles and VRUs would include identification, position and trajectory data, all processed, all ready for immediate insertion into planning algorithms. Rather than painstakingly pulling bits from a complex environment and interpreting the bits within milliseconds, the input to the routing module is directly entered and processes. VANET is a “force field” of information surrounding and protecting vehicles from collisions and ruin.
The National Highway Traffic Safety Administration (NHTSA) has developed essential VANET requirements. One is message latency requirements for active safety (Figure 1). The most stringent latency requirement, 20ms, is difficult to meet.
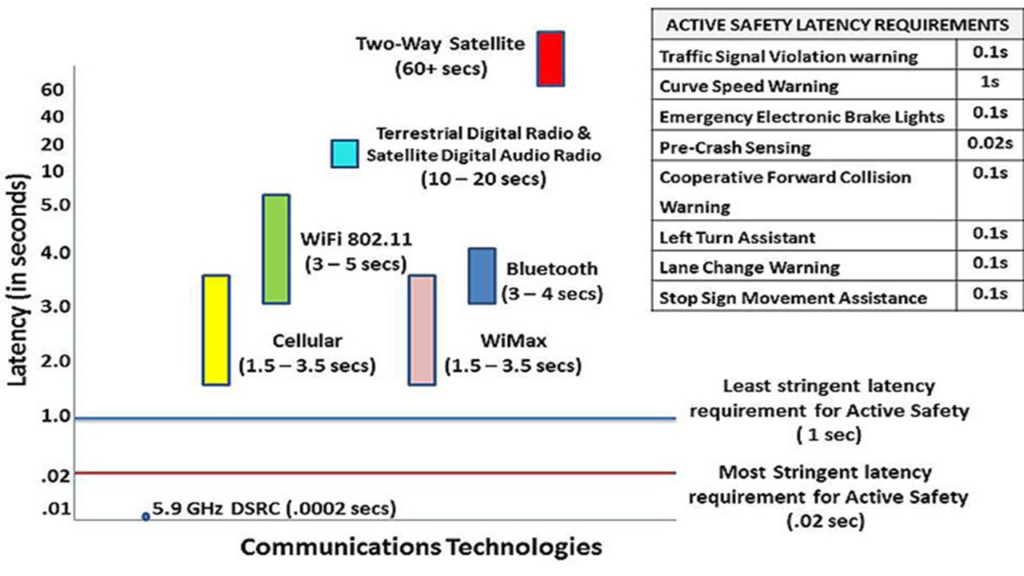
Although a number of possibilities for the VANET physical layer are available, three candidates that together could support reliable, safe and secure networks are briefly examined. The first radio is dedicated short-range communications (DSRC), a communications architecture developed by NHTSA. This radio frequency link is well developed, tested and ready for deployment, while meeting the most stringent latency requirement. NHTSA is developing regulations requiring DSRC integration into new car builds.
Pedestrians, bicyclists and other VRUs already carry wi-fi radios linked to GPS. Available applications can readily transfer this information to vehicles. A smartphone can broadcast a VRU’s positions and receive vehicle location information, and the application can then calculate and predict the location and time of a possible collision. If the VRU is in danger, a warning can be generated and transmitted to the vehicle and VRU. The smartphone information is transformed and can be input into route planning modules, enabling vehicles to “know” where VRUs are regardless of weather conditions or lighting conditions.
The third is optically based, employing vehicle headlights and tail lights as transmitters and cameras as receivers. Information would be impressed on the light at such a high rate the human would see a steady beam. This network would be immune to electromagnetic interference, serving as a backup system to the DSRC.
The USA, Europe, China, Japan and Korea are building small, roadside DSRC facilities. These installations, even with few vehicles carrying DSRC, have reduced congestion and collisions.
Drivers are retaining vehicles for longer periods than in the past. High quality of construction and reliability are slowing fleet turnover to 30 or 40 years. This long turnover delays incorporation of new safety devices, such as VANET, into the transportation system.
Retrofitting with VANET OBE would significantly reduce the time required to bring the full advantages of VANET operations to fleets. The kits would be relatively inexpensive and impose small demands on vehicle systems. By shaving the time for fleet deployment from 30 years to 10, hundreds of thousands of lives could be saved and billions in damages might never occur.
In addition to the safety applications, the exchange of detailed information on roadway and traffic conditions would enable the human or autonomous controller of vehicles to make better-informed “decisions”. Linked to smart traffic lights, VANET could be used to reduce road congestion, travel time and pollution. VANETs produce more efficient routing than an isolated AV could provide.
Local or recent information, such as street work or flooding, could be stored in roadside infrastructure and made available through the VANET. By merging the latest data with onboard information, such as the intended destination, applications could find alternative routes to avoid congestion and delays.
Autonomous vehicle deployment can benefit from the VANET, which can provide a back up to vehicle sensors and quickly locate objects the sensors might miss, with the VANET-enabled autonomous vehicle improving safety while extending operations into difficult environments.
Human road users depend on subtle communications: pedestrians establish eye contact with a driver before crossing in front of their car; drivers arriving at a four-way stop without traffic signals often signal who should go first. But AVs without a driver are blind to these interactions. Wireless links joining vehicle, pedestrians and bicyclists provide location, velocity and, to some degree, intention of the participants could remedy that shortcoming.
Vehicles operating in the VANET form groups or packs. The pack leader reports variations in roadway conditions to following vehicles. If the data buses are integrated into the engine or motor controllers, followers using that information could reduce electricity or fuel consumption.
The current state of development is backwards, with autonomous vehicle deployment proceeding ahead of connected vehicle commercialization. It should be the reverse.
Connecting vehicles with wireless links is a technologically less demanding task than designing autonomous vehicles able to operate on any road under any traffic condition and any environmental state. Equipment needed to establish these links are well-developed, well-understood and relatively inexpensive.
Related, Uber Autonomous Solutions turns AV innovation into real-world operations