
Daniel ES Kim, CEO and co-founder of mobility security company Autocrypt, explains the difference between autonomous driving (AD) and vehicle-infrastructure cooperated autonomous driving (VICAD) and argues that both need to move forward ‘hand in hand’ to speed the arrival of L5 driving automation
When Tesla rolled out the beta version of its Full Self-Driving (FSD) software in October 2020, it reignited debates about what autonomous driving really is. Many people imagine self-driving as vehicles going from point A to point B with little to no human intervention. However, there are not only several levels of driving automation but also key differences when it comes to ‘autonomous vehicles’ and ‘autonomous driving’.
In fact, although many, including those in the industry, use the terms ‘autonomous driving’ and ‘autonomous vehicles’ interchangeably, this is an oversimplification that misguides the public to believe that autonomous driving is achieved simply by making autonomous vehicles. In reality, there is so much more to autonomous driving than the vehicle itself, as factors like environment and infrastructure can be make or break for the future of autonomous driving.
What really is autonomous driving?
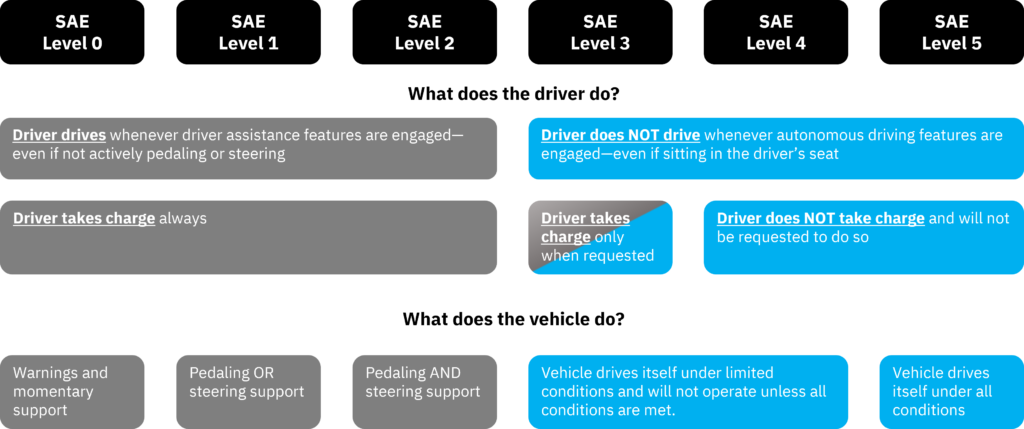
Autonomous driving can be achieved by two different conceptual and technological approaches that are quite independent of one another. The first approach is vehicle-based autonomous driving (VAD), or simply autonomous driving (AD). AD is facilitated by the cameras, sensors, computers and control systems built within the vehicle. This is the approach that people are most familiar with and discuss in everyday conversations on autonomous technology in vehicles; imagine ADAS features like lane centering and adaptive cruise control.
However, AD has its limitations. The very idea of AD is to build technologies that mimic human vision and senses. Yet, relying solely on artificial vision and senses only makes the car as good as a human, which – based on the fact that human error accounts for 94-96% of all traffic accidents – is far from perfect. Like humans, one crucial weakness of AD is that it cannot detect objects out of sight. For example, let’s say a tunnel is blocked by a serious traffic accident or a fire that is not visible from the entrance. In this case, AD will not be able to obtain the information prior to entering the tunnel, leading the vehicle to be stranded inside. This isn’t necessarily the ideal scenario that many have in mind when they think of autonomous driving.
Another shortcoming of AD is its limited ability to model the future behaviors of surrounding vehicles and pedestrians. AD relies on computers to make trajectory predictions based on analyzing object motion caught by the onboard cameras. Yet, motion prediction is a challenging task with a non-negligible margin of error. Furthermore, it cannot be done on stationary objects.
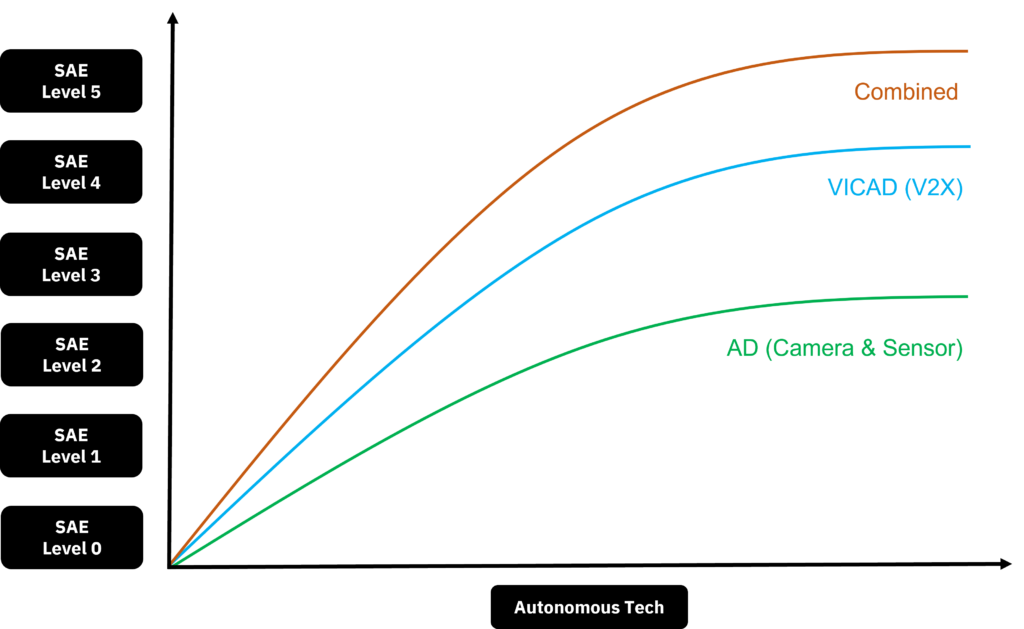
Therefore, AD by itself is not reliable and versatile enough to sustain higher levels of driving automation, as defined by the Society of Automotive Engineers. Relying solely on technological improvements in AD has got us to Level 2 and even as far as the lower boundary of Level 3; but to break through the barriers of Level 3, the industry needs to turn to a different approach.
Moving toward vehicle-infrastructure cooperation
To overcome the limitations of AD and realize driving automation Levels 4 and 5, a different approach known as vehicle-infrastructure cooperated autonomous driving (VICAD) has greater potential. As the name suggests, VICAD requires cooperation between the vehicle and its surrounding infrastructure, in an ecosystem called cooperative intelligent transport systems (C-ITS). This is mainly achieved by using V2X (vehicle-to-everything) communication technology.
V2X is the wireless communication technology that enables vehicles to communicate with other vehicles (V2V), pedestrians (V2P) and infrastructure (V2I) in real time. Instead of depending on artificial vision and senses (i.e. cameras and sensors), VICAD relies on real-time messages to communicate information, allowing it to capture everything beyond what we can see and feel.
The communication technology itself is not new. The vehicular ad-hoc network (VANET) that V2X runs on is simply a form of the mobile ad-hoc network (MANET), which allows participants to communicate directly with one another without the need for routers. Another more familiar type of MANET is the smartphone ad-hoc network (SPAN), which enables wi-fi hotspots, Bluetooth and NFC.
To ensure V2X operability, all participants must be equipped with a V2X connectivity unit. For instance, the vehicle needs to be equipped with a telematics control unit (TCU), also known as an onboard unit (OBU), and the traffic signal must have a roadside unit (RSU) built inside.
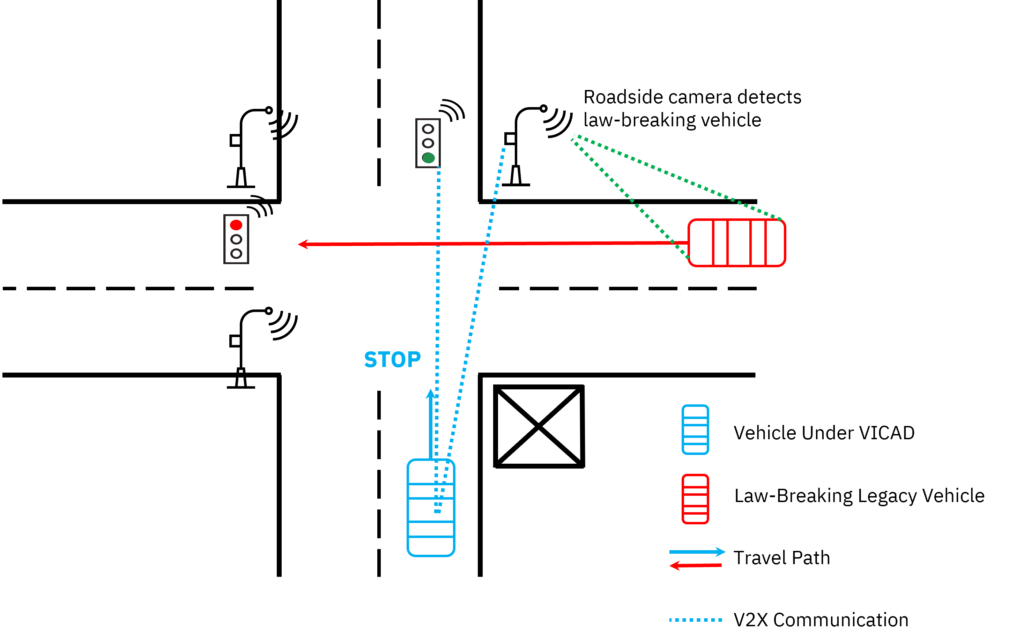
With VICAD, when a V2X-enabled vehicle wants to pass through an intersection, the RSU in the traffic signal transmits a basic safety message (BSM) to the OBU in the vehicle, notifying the current signal status and remaining time (a V2X service known as signal phase and timing) while the OBUs in other vehicles send BSMs to notify their current and intended behavior. All this information is then used (in real time) to determine whether to pass or stop at the intersection.
But what if a non-connected legacy vehicle were to violate the traffic law? To prevent this, roadside cameras will constantly monitor abnormal behaviors on the road and share the predicted behavior of other moving objects around the intersection using machine learning and artificial intelligence. This way, even if another car in the cross direction were to run a red light, the vehicle would still be able to stop in time.
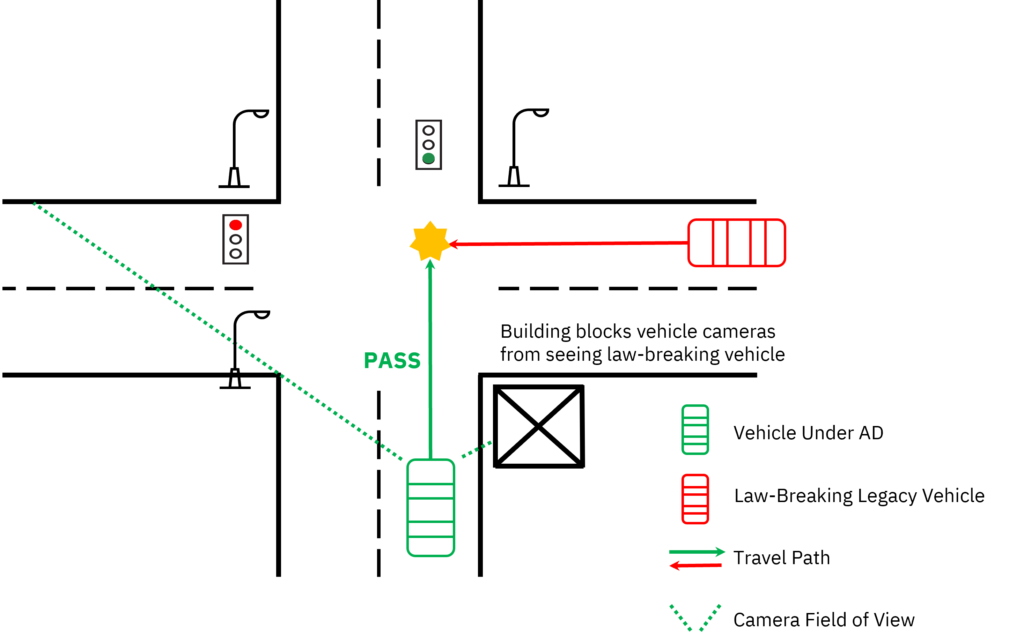
In comparison, without VICAD, the vehicle would rely on AD to pass the intersection. Even though AD might still allow the vehicle to pass through safely most of the time, it is less dependable when responding to abnormal situations; the onboard cameras and sensors might be less accurate in extreme weather conditions, while large buildings around the corner could block their view, preventing the car from seeing all situations in the cross direction. Its ability to detect and react to traffic-law violators is also weaker, which explains again why AD alone can only reach driving automation Levels 2 and 3.
VICAD and AD, hand in hand
Today, developments in AD have reached a phase of diminishing returns, such that spending more time and money on improving camera and sensor technologies no longer provides promising breakthroughs that lead us to higher levels of driving automation. So far, AD has helped us reach the lower boundary of SAE Level 3. That’s a great feat in itself. But to reach advanced Level 3 and beyond, the industry is pouring most of its resources into VICAD developments, and rightly so.
Fortunately, we are beginning to witness promising results from these investments. Many high-end vehicles are now built with V2X connectivity, while some fundamental V2X infrastructure is nearing large-scale commercialization. For instance, SPaT (signal phase and timing) is one of the pioneering VICAD features that are currently deployed in many C-ITS regions across the globe. With SPaT, vehicles can calculate the time needed to reach a signalized intersection and determine whether to continue cruising forward or decelerate to a stop, based on real-time information (i.e. light color and remaining time) shared by the RSU in the traffic signal controller.
High-level driving automation will depend mainly on VICAD. However, although VICAD provides a more versatile experience, AD is still a major player. While VICAD takes charge most of the time, AD will be used to complement it by detecting legacy vehicles, pedestrians without smartphones, and of course other non-IoT obstacles like rogue rocks or animals. A vehicle can only be fully autonomous under all conditions (SAE Level 5) with the combined technologies of VICAD and AD.
The development process of VICAD
VICAD takes longer to develop than AD given that it’s a cross-industry project that requires interoperability between multiple parties. Simply installing V2X connectivity units into vehicles and roadside infrastructure does not automatically make the C-ITS function.
Adding to the complexity is security, which is a prerequisite for VICAD. The working parties need to ensure that all participants can transmit messages securely via V2X connections. This means that regardless of the manufacturer, all vehicles, chipsets, terminals and communications security systems must work across platforms and standards. If we look at the supply chain, at the assembly line, all vehicle, infrastructure and device manufacturers need to install V2X connectivity units (e.g. OBU, RSU) in their products, which must be designed and tested with the hardware suppliers. Within these units are communication modules built by software providers, enabling message transmission. Then there are the V2X security modules that encrypt the BSMs transmitted between the participants. Lastly, a public key infrastructure (PKI) is embedded within the module to verify the digital certificate of each participant during communication. Digital certificates are issued by trusted third parties known as root certificate authorities (CA).
The C-ITS is a result of close collaboration between manufacturers, hardware suppliers, software suppliers, cybersecurity providers and the root CA, not to mention that governments and regulatory bodies need to establish and enforce laws and standards to ensure security and safety. Even after all components are manufactured in accordance with standards, V2X interoperability must once again be verified by beta testing on actual roadways.
Nevertheless, don’t be discouraged by the scale and complexity because we are not talking in terms of a product or service but an entire system. We need to acknowledge that the C-ITS is by no means to be completed in a day, or a year, or even a decade. Rather, it is an ecosystem that gradually emerges from the interactions of individual V2X services like SPaT and pedestrian collision avoidance (PCA); just like how a public transit system gets built – start with individual routes and the network eventually takes shape.
Sharing the vision for the next level of automation
In recent years, the public has grown increasingly familiar with AD-based ‘autonomous vehicles’. But as more and more consumers are looking into these features and considering adoption, the ongoing developments and deployment of VICAD remain a relatively closed-off topic shared only among the stakeholders and industry experts. While paving the path toward the next level of driving automation and sustainable transport, it’s important to share this vision with the public and generate momentum for this multi-industry project, because eventually, everyone will be a participant of VICAD.