
A great deal of point cloud data has been gathered in Japan, but so far this data has had limited uses in an unprocessed state. However, researchers in the country have now proposed a deep learning algorithm utilizing high-precision 3D maps to automatically generate training data for constructing a road feature identification model from the point cloud data.
The new model has a higher precision than current methods, and the team believes that it could be indispensable in the area of autonomous driving and urban management. To date, a large amount of point cloud data (a set of data points in space) has been measured and accumulated for public works in Japan using mobile mapping systems and terrestrial laser scanners. When in an unprocessed and unstructured state, the vast amount of data only has a limited use, but thankfully, it can be structured by automatically extracting a feature using a plan of completion drawing which displays the completed geometry of a construction object.
In early 2022, a team of researchers from Japan, led by Professor Ryuichi Imai of Hosei University, proposed another method for extracting road features using high-precision 3D (HD) map data. The applicability of their approach, however, was limited to the developed sections of road maps. The issue could have been solved using deep learning-based identification, but this requires a huge amount of manually prepared, high-quality training data.
More recently, Professor Ima and his team – Kenji Nakamura of Osaka University of Economics, Yoshinori Tsukada of Setsunan University, Noriko Aso of Dynamic Map Platform and Jin Yamamoto of Hosei University– succeeded in developing an algorithm to automate the process of training data generation and constructed a road feature identification model from point cloud data extracted automatically from HD maps.
“Currently, people need to visually check the point cloud data to identify road features as computers cannot recognize them. But with our proposed method, the feature extraction can be done automatically, including the features at undeveloped road map sections,” explained Professor Imai.
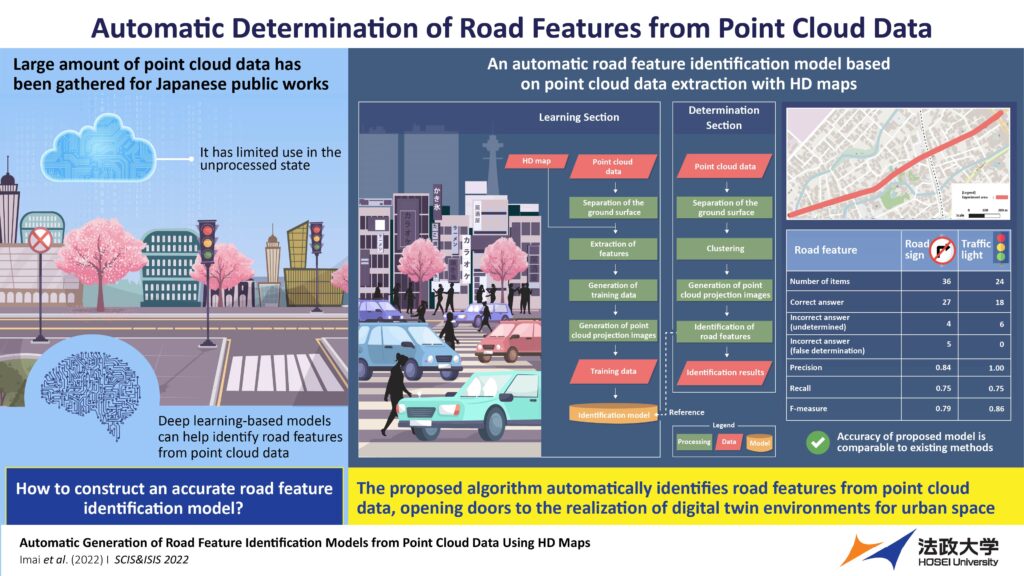 During the group’s study, researchers began by separating the ground surface from the point cloud data using the CloudCompare software. Following this, the team then generated area data from the HD map and extracted component points of features. While these points were assigned as either road signs or traffic lights, other labels were provided for the remaining data. The area data corresponding to the component points was then extended to generate the training data. Using this, the researchers further generated the point cloud projection images. They then used the training data to construct the identification model using a YOLOv3 object-detection algorithm. As a result, the model can detect road features based on clustering points other than those identified for the ground surface using CloudCompare.
During the group’s study, researchers began by separating the ground surface from the point cloud data using the CloudCompare software. Following this, the team then generated area data from the HD map and extracted component points of features. While these points were assigned as either road signs or traffic lights, other labels were provided for the remaining data. The area data corresponding to the component points was then extended to generate the training data. Using this, the researchers further generated the point cloud projection images. They then used the training data to construct the identification model using a YOLOv3 object-detection algorithm. As a result, the model can detect road features based on clustering points other than those identified for the ground surface using CloudCompare.
Having established the computational framework, the team conducted demonstration experiments in the Shizuoka Prefecture on a road with 65 road signs, 46 traffic lights and noise features over a 1.5km distance. In total, 258 road signs and 168 traffic lights were used to train the researcher’s identification model; 36 and 24 images, respectively, were used by the team to calculate algorithm determination accuracy.
Upon completion of the demonstration, the researchers found that the precision, recall and F-measure were 0.84, 0.75, and 0.79, respectively for the road signs, and 1.00, 0.75 and 0.86, respectively, for the traffic lights, indicating zero false determinations. The precision of the proposed model was shown to be higher than existing models.
“A product model constructed from point cloud data will enable the realization of a digital twin environment for urban space with regularly updated road maps,” concluded Professor Imai. “It will be indispensable for managing and reducing traffic restrictions and road closures during road inspections. The technology is expected to reduce time costs for people using roads, cities and other infrastructures in their daily lives.”