
Road safety in the future will rely much more on the quality of data than on its quantity – which is sometimes abundant compared with actual needs. Geographical coverage, granularity, temporal accuracy and proximity to the critical point where a driver assistance system must intervene in fractions of a second may be crucial.
The quality of the information often requires integration between road infrastructure and driver-assisted vehicles.
Data collection methods and tools: fixed and mobile
The commonly adopted fixed instruments available can be classified into the following types:
1. Pneumatic sensors
2. Inductive loops
3. Piezoelectric
4. Magnetometers
5. Video detection
6. Microwaves
7. Ultrasound
8. Infrared
9. Passive acoustic
Systems 1, 2, 3 and 4 are called intrusive systems, because they are installed on or within the road pavement (Figure 1, Figure 2). The remaining systems are defined as non-intrusive because they are installed at the roadside, above the carriageway, and generally do not interfere with traffic flow during installation or operation.
The choice of technology is usually related to the observation scenario.
Intrusive measurement systems are also referred to in the international literature as GD (ground vehicle detectors). An overview of the relationship between intrusive measurement instruments and their potential applications with observable traffic parameters can be found in Table 1.
| Type | Application |
| Pneumatic sensors (tubes) | Speed, number of axles, vehicle classes, multiple lanes |
| Inductive/loop sensors | Length, vehicle speed, classes, number of axles and wheelbase, other uses (with appropriate software) |
| Magnetometric sensors | Length, vehicle speed, classes, number of axles and wheelbase, other uses (with appropriate software) |
| Piezoelectric sensors | Weight, speed, classes |
| Capacitive sensors* | Weight, speed |
| WIM (weigh-in-motion) sensors | Ground load detection, typically for vehicle axles via pressure on the sensor support |
Table 1: Types and main applications of automatic sensors for traffic surveys using intrusive systems
*Capacitive sensors detect changes in capacitance caused by the approach of an object: the advantage is that they can detect almost all materials, from metal to oils. However, there are no known significant applications in the field of traffic monitoring.



Figure 1: Inductive loops on a motorway (traffic and speed monitoring) and an urban road (traffic light cycle control); a magnetic sensor (right)


Figure 2: Piezoelectric sensors: the white sensor (left) is activated and deactivated by two inductive loops; on the right, weighing at the entrance to an intermodal terminal
Non-intrusive measurement systems are installed above the road pavement or at a distance from the road, and are also referred to as AGD (above-ground vehicle detectors). During installation, as well as during any repair or replacement work, they do not cause significant disruption.
Table 2 lists the main uses of non-intrusive sensors (Figure 1, Figure 2, Figure 3, Figure 4) with reference to observation objectives and the most widely adopted technologies.
| Application | Objective | Technologies |
| Vehicle counting | Detection at speeds >10km/h | Detection video* Microwave Doppler Passive infrared Laser Ultrasound |
| Vehicle speed detection | Detection at speeds >10km/h | Video detection Microwave Doppler Laser |
| Traffic-light control in good weather conditions | Detection of stationary vehicles
|
Video detection Microwave Passive infrared Laser sensors Ultrasound |
| Traffic-light control in poor weather conditions | Detection of stationary vehicles
|
Video detection, infrared Microwave Ultrasound |
| Real-time traffic monitoring | Inductive loop emulation
Roadside installation |
Video detection Microwave Passive infrared |
| Vehicle classification | Length classification | Laser Video detection |
| Vehicle classification | Profile classification | Laser Microwave |
Table 2: Main applications of non-intrusive systems, positioned away from the road surface depending on the objective
* VIP (video image processing)






It is possible to integrate one or more of the technologies listed above, adding others – for example, those relating to environmental monitoring – to create so-called wireless sensor networks (WSN) (Figure 5). Electrical and electronic monitoring devices, either self-powered or passive, can exchange data with one another and with certain access points via wireless communication networks.

The collection of traffic data from mobile sensors is a technique that has been in use for several years, albeit one that is subject to further development, often used to supplement – and sometimes as an alternative to – observations made from fixed stations. In this context, the presence of moving vehicles on the roads can be used to gather information on traffic flow; this technique is also known as floating car data (FCD) or probe vehicles. Some solutions are based solely on measuring the speed of suitably equipped vehicles, which – when compared with the maximum permitted speed on that stretch of road under free-flow conditions – allows the flow conditions on that stretch to be derived or estimated and, consequently, the journey time during the various time slots of the day. More comprehensive data collection is an advantage of mobile detection, as it can ensure continuous coverage of data collection along the infrastructure – provided that a sufficient number of vehicles is spread out across the network – and is therefore not limited to the road sections where fixed sensors are installed.
Typical use of aggregated data
Every day in a typical region or small country, for example, thousands of fixed sensors collect data from the road network, and millions of smartphones and onboard GNSS transmit their position and speed to major platforms such as Google Maps or TomTom, or to telecoms companies and their subsidiaries; these collective data streams, known as crowdsourced traffic data (CTD), have transformed traffic management at urban and extra-urban scales, enabling congestion detection and alternative routes to be provided to users for improved navigation services. Also, historical analyses can be performed for road networks based on available and stored traffic conditions.
Although they are valuable and now well-established tools in transportation planning, these have a limitation that cannot be ignored: they are statistical data, based on averages and aggregations from a sample of devices.
A CTD platform can provide reliable information on whether a section of a ring road is congested during a specific time slot, but it cannot provide information on specific events such as a pedestrian crossing outside the walking areas or a stationary vehicle parked in the wrong direction.
Therefore, what could ADAS systems require from the roadside? Onboard sensors – lidar, radar, cameras – have specific capabilities but suffer from very specific physical limitations. Technological choices made by various manufacturers have led to significant differences in their approaches; for example, the ‘all-camera’ of some car makers or the full range of available technologies typical of high-end European production.
There are some doubts, when striving to obtain the maximum safety and accurate perception of the surrounding environment, about whether an autonomous vehicle traveling through, for example, a busy urban roundabout should rely solely on its own local perception.
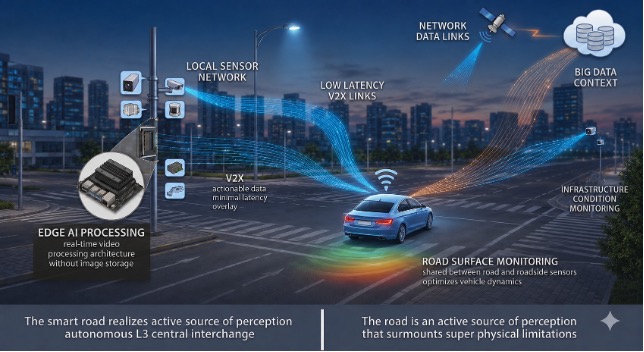
This is where the concept of the smart road and V2X (vehicle-to-everything) architecture comes into play: road infrastructure becomes an active source of information that complements and enhances the vehicle’s perception. However, for this to work in real time, the data must come from locally positioned sensors, calibrated to the specific environment, and capable of transmitting information with minimal latency.
For these applications, a technical requirement can derive from the level of detail that may differ from traditional monitoring, not only in terms of geometric precision but also in the nature of the information produced. A computer vision system, possibly supported by AI, installed at a complex junction, is capable of providing, in real time, the trajectory of individual vehicles, their instantaneous speed, classification by type, the presence of pedestrians and cyclists, and the occupancy status of lanes.
Compact systems based on embedded hardware can transform a video stream into a structured database of events, accessible in real time from a connected vehicle potentially interested in knowing the local situation.
In practical ADAS applications, the most significant use cases emerge in urban scenarios, where complexity is generated from the various users interacting. At a traffic-light junction with reduced visibility, a road sensor can detect the presence of an approaching emergency vehicle and transmit the alert to connected vehicles even before they can detect it with their own sensors.
In a restricted traffic zone with access regulated by emission class and by the environmental label of a vehicle (CO2 emitted from its construction until its first operation), a camera-based system can communicate to the vehicle not only authorization rights but also information on traffic within the zone.
Other applications involve monitoring the condition of the road surface: computer vision systems trained to classify pavement degradation can alert the vehicle to reduced grip conditions in advance, allowing ADAS to adapt driving dynamics proactively.
Similarly, sensors integrated into the infrastructure can help monitor the tire conditions of passing vehicles, a safety-critical piece of information that a vehicle cannot reliably derive on its own and that it can use to adjust its behavior based on the safety rating assigned to nearby vehicles.
Conclusions
The trajectory of technological evolution is likely to reinforce the validity of a hybrid approach.
Bluetooth devices remain excellent for generating origin-destination matrices and for estimating journey times on a network-wide scale.
Counters and classifiers remain the preferred solutions for the measurement of vehicle flows, even in difficult weather conditions.
Computer vision adds to this ecosystem the ability to produce semantically rich data, trajectories, behaviors and anomalies that other sensors cannot generate.
The real leap in quality occurs when these layers of information are integrated into a coherent data architecture, where the macroscopic level of the CTDs provides the network context and the detailed level of the local sensors provides the local scene perception required by ADAS.
Depending on the context, it is important to evaluate, during the decision process, which information is most appropriate in a specific situation.
The desired evolution is therefore moving toward a smart road ecosystem; road infrastructure is undergoing a silent yet radical transition: from a passive surface to a distributed sensor-based system. The road is no longer merely the physical surface on which the vehicle moves, but an active source of local perceptions and general information about the surrounding environment that extends the vehicle’s own sensory capabilities beyond its technological limits.
For this transition to deliver the expected benefits in terms of safety and traffic flow, the technical-scientific community may have the role of supporting the use of big data and data that can be available only at local level, deriving from well-positioned and well-calibrated sensors (Figure 8).
References
1) Dalla Chiara B (2021), ITS for Transport Planning and Policy. In: Vickerman, Roger (eds.) International Encyclopedia of Transportation vol 6. pp. 298-308. United Kingdom: Elsevier Ltd; https://www.sciencedirect.com/referencework/9780081026724/international-encyclopedia-of-transportation
2) Basili E, Caschili C, Dalla Chiara B, Pellicelli M (2024), The impact of road accidents on hospital admissions and the potential of ADAS in containing health expenditure: Evidence from Piedmont data, Transportation Research Interdisciplinary Perspectives, Volume 25, 2024, 101125, ISSN 2590-1982, https://doi.org/10.1016/j.trip.2024.101125
3) Pascale A, Deflorio F, Nicoli M, Dalla Chiara B, Pedroli M (2015), Motorway speed pattern identification from floating vehicle data for freight applications. Transportation Research Part C: Emerging Technologies 51, 104–119. doi:10.1016/j.trc.2014.09.018